

文|邱晓芬
编辑|苏建勋
2023年底,全球出货量最大的动作捕捉设备提供商"诺亦腾(Noitom)"联合创始人戴若犁,一度以为自己被骗了。
他接到了两通神秘电话,对方声称来自美国机器人独角兽A公司、汽车巨头B公司(应受访者要求做化名处理),表示需要采购110套动捕设备。
“这是骗底价的话术吧?”,戴若犁心想,以他在行业超过十年的经验来看,这种超百台的订单需求从没存在过。
动作捕捉行业的特点是,客户虽都是大企业,但仅需几台设备就能做出一部大制作。2012年成立至今,“诺亦腾”已经获得全球70%的专业动捕市场份额。
《权力的游戏》、《金刚狼》、《星际迷航》、《星球大战》等好莱坞巨作,背后的动作捕捉设备都出自这家公司之手。
不过,在具身智能机器人时代,“诺亦腾”却撞上了意想不到的机遇——数据短缺,是机器人目前最大的挑战之一。动捕设备,则是采集数据行之有效的工具。
对于前述两家美国公司来说,靠动捕设备采集的多模态且精确的数据,是训练机器人的“燃料”,直接决定了机器人的智力水平。
具体而言,动捕师在包括头、手、腿、腰等几个关键骨骼位置,绑上惯性传感器或光学标记点,做出各种精细动作。

△PNDbotics Adam-U 机器人通过 Noitom Robotics 遥操作系统控制采集数据
所收集的真人数据经过遥操作等流程,映射为机器人本体的各种传感与运控信息,得以“喂”给机器人。从此,人类“手把手”教机器人干活成为现实。
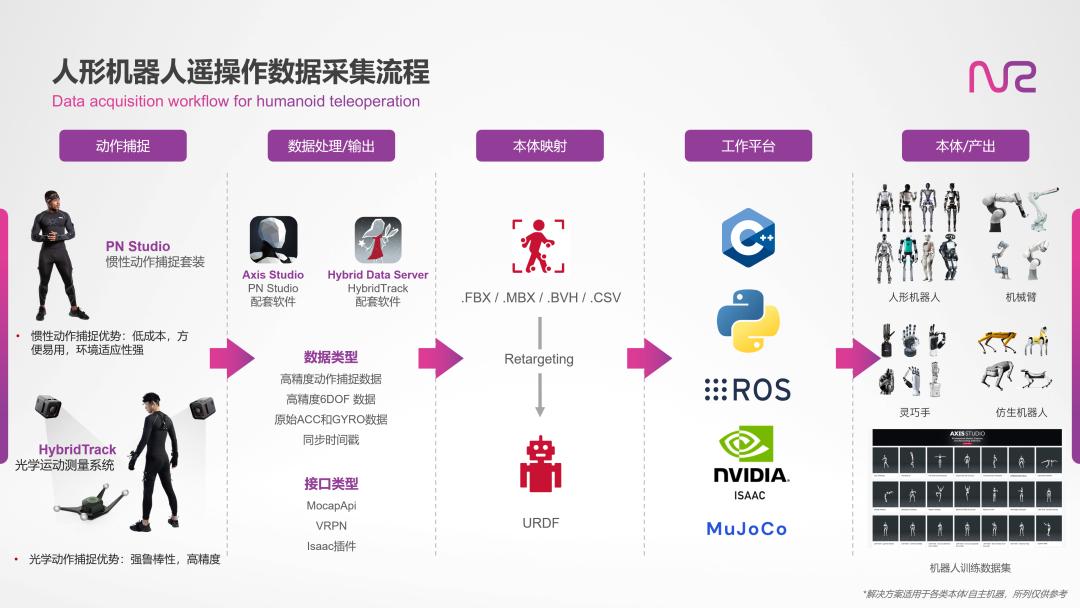
△Noitom Robotics 人形机器人遥操作数据采集流程
一组对比数据可以如今看出机器人数据之紧缺:谷歌Deepmind曾联合斯坦福在内的21家顶级科研机构,整合了60个数据库,才制作出世界上最大的机器人数据集Open X-Embodiment,包含100万条真实数据——比GPT-5(百万亿)低了六个数量级。
在看清了行业趋势后,戴若犁决定“All in机器人”。
2025年年初,「诺亦腾」将其搭建的机器人团队拆分成独立运营与融资的新公司,新公司同样命名为“诺亦腾机器人(Noitom Robotics)”,主要业务聚焦于机器人数据。
“Noitom Robotics”核心团队于数月前已经组建完毕,毕业于中国科学技术大学与香港中文大学的戴若犁在行业有相当号召力,圈子里人称“小戴师兄”、“戴博士”。《智能涌现》了解到,目前团队核心成员包括:
前腾讯Robotics X Lab 具身智能中心负责人韩磊(T13),担任公司首席科学家;
前字节跳动新石实验室前硬件负责人(4-1级)、罗永浩「细红线」的硬件负责人许安民,担任公司硬件工程负责人;
以及来自商汤科技、百度、阿里巴巴等大厂的前高层担任产品、开发以及销售、BD等业务的负责人。

△戴若犁
《智能涌现》独家获悉,“Noitom Robotics”已完成了由阿尔法公社、经纬创投等知名机构投资的数千万元天使轮融资。近期,他们的Pre-A轮融资正在进行中。
把动捕设备卖给机器人厂商,今年签单数千万
当具身智能机器人爆火,行业里99.99%的公司苦苦寻求商业化落地之时,“Noitom Robotics”却通过发现数据采集价值,率先实现商业化。
营收方面,“Noitom Robotics”在2025年前八个月已经有数千万的签单,相比去年全年涨了五倍。“国内几乎所有的机器人厂商,都和我们买过设备采集数据”。
戴若犁用两个字母向《智能涌现》介绍了他们的商业模式:Project T(Tele-opreation 遥操作)、Project D(Data factory 数据工厂)。
在Project T路线里,戴若犁又设计了数据采集和部署配套两种模式。
数据采集顾名思义,指的是销售用于遥操作数据采集的动作捕捉设备。戴若犁向《智能涌现》介绍,在前述两家美国头部机器人厂商订单敲定后,近两年,他们又接到了国内近30家机器人厂商的订单,包括达摩院、智元、千寻、字节、小鹏、腾讯。
除此之外,还有李飞飞在内的一众高校的机器人研究所、地方政府牵头的机器人共建基地等等.....
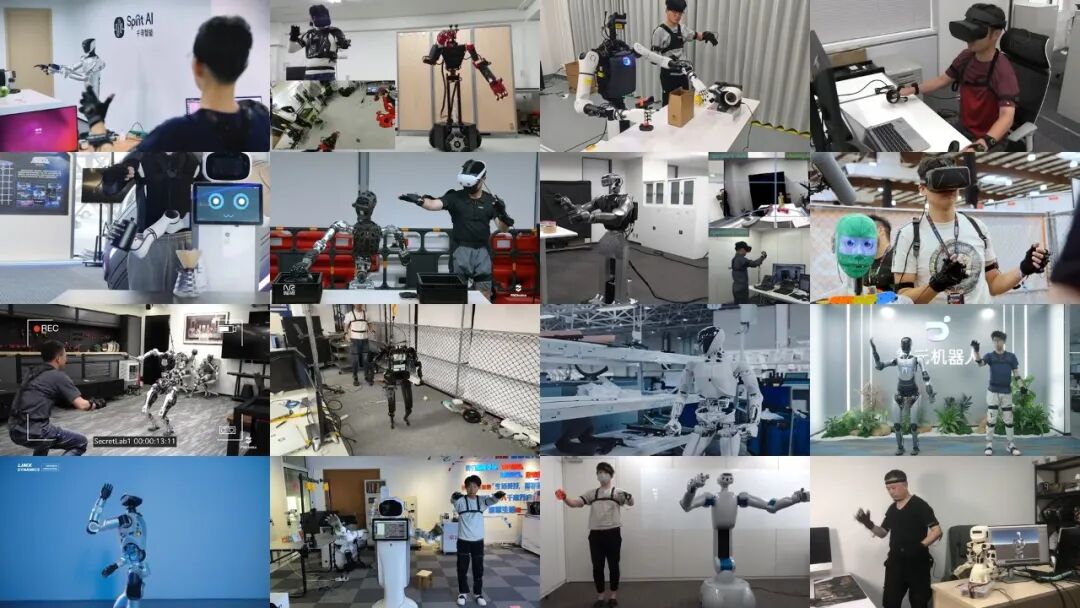
△部分与 Noitom Robotics 开展合作进行机器人遥操作与数据研究的客户
部署配套,“Noitom Robotics”则是计划布局机器人落地的未来。
戴若犁判断,与无人驾驶行业类似,当人形机器人真正进工厂、家庭时,将会产生一定数量的安全席位。安全席位构建了机器人落地应用的安全底线,用于在紧急情况下接管机器人并处理复杂场景,保障人类安全和机器人的运行。
未来,“Noitom Robotics”也计划提供机器人落地的全套服务,包括安全席位里的远程操作端侧设备、相应的管控软件、附带的BPO人力服务(即业务流程外包)等等。
概括起来,Project T的商业模式就是卖硬件、卖服务。
但不仅止步于此。
“Noitom Robotics”还在筹备搭建数据采集工厂(Project D),希望做卖数据、卖授权的生意——相比之下,数据比硬件的边际效应更大,Meta以150亿美元收购Scale AI(数据服务公司)近半的股权,也足以证明数据的价值。
戴若犁向《智能涌现》透露,他们目前已经在深圳等地选址建厂。戴若犁预测,未来,Project T的常态化年收入或将达到亿级别,Project D则有望到十亿级别。
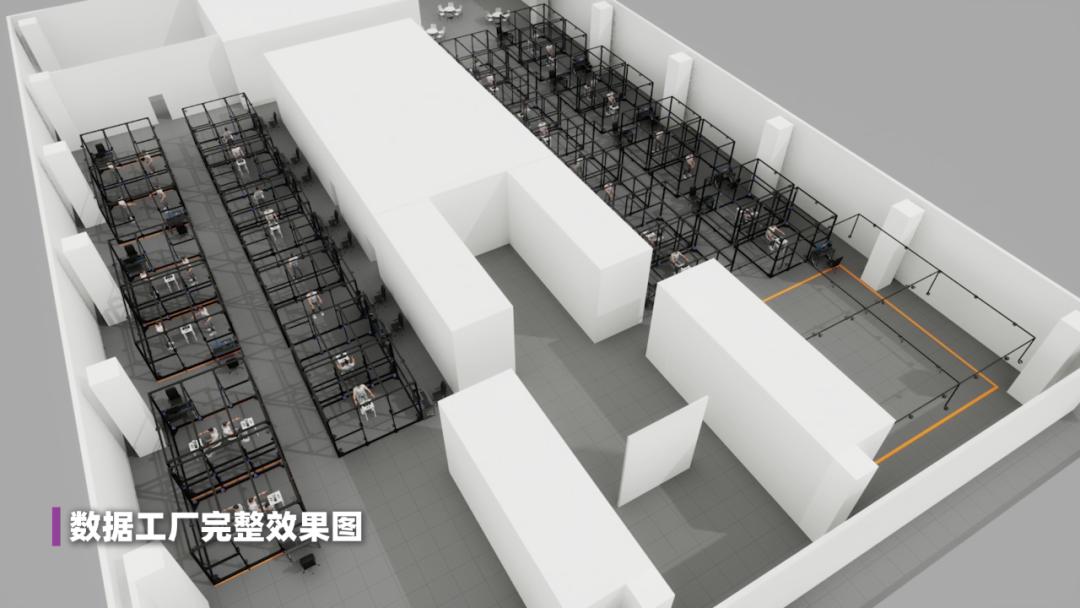
△Noitom Robotics 数据工厂示意图
不过,要成为机器人领域的Scale AI,“Noitom Robotics”绕不开的核心拷问是:机器人需要采什么数据?
机器人数据纷争,尚未收敛
「数据」,是具身智能机器人领域现在一大痛点。行业的分歧,可粗浅分为两派:
大部分人借鉴了大语言模型的来时路,认为scaling law在具身智能同样适用。原因是,自动驾驶作为具身智能的子集,已经印证数据的魔力。
而以王兴兴为代表的人士却高呼,行业不应该在模型还不够优秀、不够统一的情况下,就盲目堆大量数据。
有行业人士向《智能涌现》表示,自动驾驶靠上千万台车在收集数据,收集了好几年,还一直停留在L2++++,“机器人领域如果模仿自动驾驶大量收集真机数据,要费多少时间?花多少钱?简直太笨了!”
另一位行业人士向《智能涌现》概括,真机数据最大的问题是,质量差、效率低、成本高。
前述人士透露,国内某机器人大厂去年上半年产出一小时合格的真机数据,需要两名人员遥操作一天、每人收集八小时才能完成。
而以特斯拉为例,美国摇操员的时薪高达50美金,日常还要穿着动捕服和VR设备工作7小时以上。
为了解决真机数据的种种掣肘,行业里也有不少厂商选择扩大数据范围,比如直接给机器人“喂”互联网的视频数据、用AI合成一系列仿真数据,或者直接用动作捕捉设备采集真人数据等等。
在行业分歧尚未闭合之前,戴若犁试图用「金字塔结构」,来解答机器人领域目前的困局。
他把机器人所需的数据分为四层:
金字塔顶部的依旧是真机遥操数据。他认为,真机数据是最高质量的数据,其作用正像是汽车出厂后跑的10万公里——用于搜集汽车的“本体特性”。
不过,真机数据除了前述缺点外,最大的难题是无法跨越本体。正如,你很难将宇树机器人的数据,顺畅应用到智元的机器人上,中间存在较大折损。
所以,他也反对在真机数据的层面,盲目追求泛化性。“就像汽车出厂后,10万公里的验证就够了,不应该追求10亿公里这么高的数量级,要求遥操作上体量的需求是很奇怪的”。
戴若犁反而认为,真人数据才是机器人产生泛化性的关键。在金字塔的第二层、第三层,他认为应该是高精度、低精度的真人交互数据——真机数据和真人数据的差别在于数据是谁产生的,前者是源于机器人,后者源于人类。
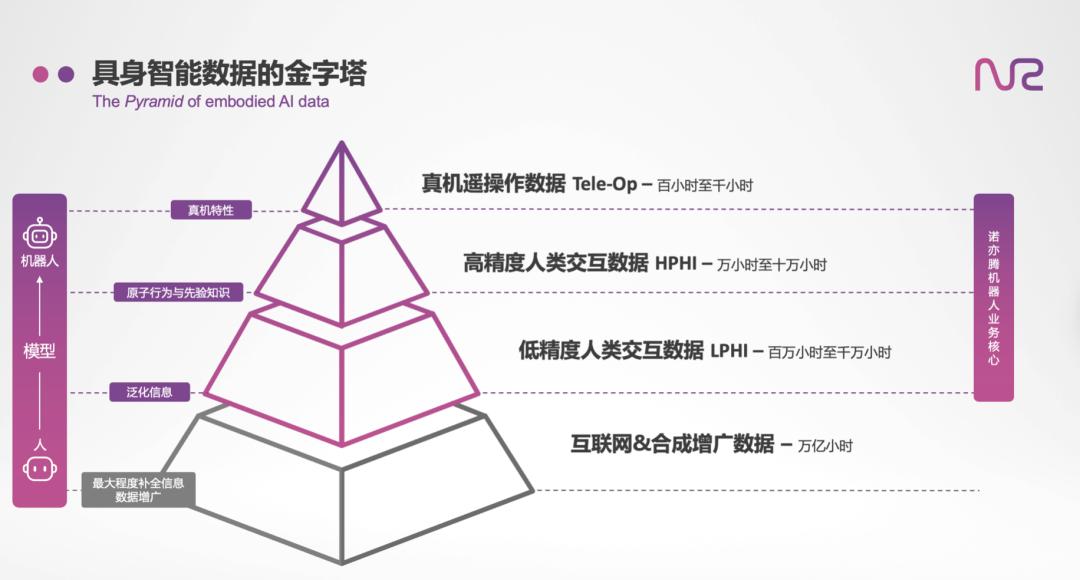
△具身智能数据的金字塔 图源:Noitom Robotics
真人数据最大的特点是高维度、多模态、高精度。在他看来,用高维度的人类数据,映射到低维度的机器人,更行之有效,也更能解决跨本体的问题。
“因为你并不清楚机器人未来的传感器是什么精度的,从低维度到高维度的映射是不可行的,或许导致数据量不够的问题”,戴若犁向《智能涌现》表示。
只是,真人行为漫无边际且复杂,如何收集?
戴若犁试图将人类的动作“原子化”。他将人类的动作抽象为:抓、拿、抛、捏、推、撵、搓、拧等等。
未来,“Noitom Robotics”计划在他们的数采工厂里,设计一些长程任务,覆盖真人数据采集任务。戴若犁表示,他们正制作一个高达数十万小时的数据集,并计划对行业部分开源。
在金字塔第三层,则是低精度人机交互数据。对此,戴若犁的观点也相当反共识。
他认为,这部分数据最佳的收集设备,不是机器人,而是现下火热的AI眼镜。未来,随着摄像头逐渐成为AI眼镜品类的标配,眼镜所收集的数据,正是场景多样、目标泛化、数量集庞大、且成本极低的。

△跨本体映射的虚拟遥操作示意
当然,戴若犁并不反对互联网信息在机器人领域的运用。在金字塔的底层,他认为广袤的互联网合成数据、仿真数据同样必不可少,将大大扩充数据边界。未来,机器人数据金字塔的每一层,都会比它的上一层“大两个数量级”。
当机器人数据成为未来机器人厂商的决胜关键,戴若犁判断,未来,国内或会有近半资金用于解决机器人数据的难题——2025年前8个月,机器人领域的融资额达到386亿元,已经是2024年全年的2倍。
纵使机器人领域充满了非共识,但可以确信的是,机器人数据的瓶颈以及其衍生的商业价值,正在被看见。

end
