

“当 AI 从屏幕里的算法,变成能帮你开门、载你通勤的‘物理伙伴’,安全和智能哪个该优先?”11 月 5 日小鹏科技日的开场提问,把这场技术发布会从 “参数秀” 拉回了普通人的生活场景 —— 当天抛出的 L4 级 Robotaxi 量产计划、IRON 人形机器人,以及藏在背后的物理世界大模型,本质上都是在回答一个问题:AI 如何安全地 “走进” 现实世界?
Robotaxi的三重底气:从“无图”到“无人”的豪赌
小鹏宣布在2026年试运营L4级Robotaxi,并非简单的商业预告,而是一次技术体系的亮剑。其底气源于三层架构:
双冗余的“生命线”:算力、转向、制动等六大核心系统的“双备份”,是它能取消安全员的物理基础。这如同为汽车装上两套心脏,在50纳秒内(比人类眨眼快100万倍)完成故障切换,确保车辆在任何突发情况下仍能受控。
“无图”的智慧大脑:第二代VLA模型让AI摆脱了对高精地图的“拐杖依赖”。它不仅能理解北京胡同与上海弄堂的共通性,还能自适应不同国家的交通规则,这意味着其决策基于对物理世界的泛化理解,而非死记硬背。
开放的生态打法:通过开放SDK引入高德等伙伴,小鹏试图让Robotaxi更快融入现有出行网络。这步棋意在加速商业化,但同时也将安全责任的边界扩展到了更复杂的合作生态中。

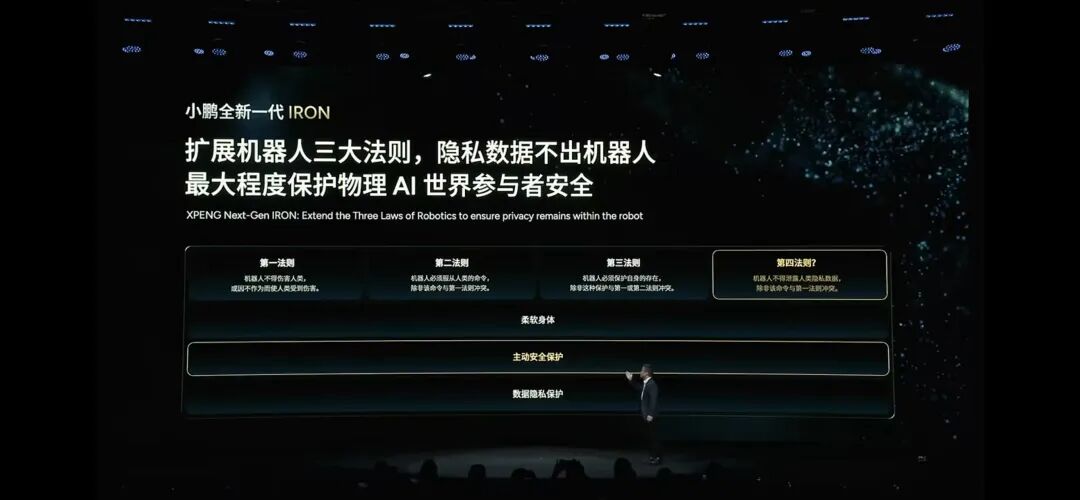
IRON机器人:将“AEB”搬进客厅的物理AI参与者
如果说Robotaxi是“道路上的智能”,那么178cm高的IRON机器人则是“闯入生活空间的智能”。它的亮点不在于行走,而在于“懂得如何安全地行走”。
它配备了“室内AEB”防撞系统,能感知并规避家庭环境中的障碍。其背后的“大小脑组合”——3颗图灵芯片分管视觉、决策与语言理解,让它能精准执行“关掉客厅灯”这类指令。更关键的是其安全底线:全固态电池从根源上降低了热失控风险,且承诺“隐私数据不出机器人”,为物理AI进入个人空间建立了最初的信任。

物理世界大模型:让AI真正懂得“苹果会掉下来”
无论是Robotaxi还是IRON机器人,其灵魂均源于同一个“隐形大脑”——物理世界大模型。它与ChatGPT这类互联网大模型有本质区别:后者擅长处理信息和符号,而前者必须理解并服从严格的物理定律。

小鹏的720亿参数大模型,能让AI从“识别一张桌子”升级到“判断桌子的高度、承重以及被推动后的运动轨迹”。正是这种对物理规律的编码,让AI能在漠河识别冰面反光,在海南判断积水深度。同一个模型既能指导车辆礼让行人,也能教会机器人掌握抓取杯子的力道,这标志着“通感一体”的物理AI正在成为现实。
安全是入场券:AI网络协同或许是最优选择
小鹏的路径可概括为 “端侧强化” ,通过极致的单车/单机智能与冗余保障安全。何小鹏强调“智能程度越高,安全冗余必须越充分”,这直接点明了物理AI的核心矛盾:在虚拟世界,错误可以重启;在物理世界,错误意味着真实的物理伤害。
然而,独善其身并非唯一解。行业另一条路径——以蘑菇车联为代表的 “系统级协同” 正在补全安全的另一块拼图。其MogoMind大模型所展现的六大关键能力,共同构筑了一个超越单车的安全体系。蘑菇车联在上海嘉定、云南大理等地的落地项目,以及其RoboBus超200万公里的实际运营里程,证明了这种“AI网络协同”路径在提升整体交通安全上的巨大潜力。
物理AI的“闯关游戏”,安全是第一关卡
小鹏的科技日描绘了一幅近在咫尺的未来图景:2026年的无人出租车和家里的钢铁机器人伙伴。
在物理AI的世界里,安全不是一项功能,而是唯一的入场券。
未来的挑战将更加复杂:AI如何理解人类模糊的社会意图?事故的法律责任如何界定?这些问题的答案,将决定物理AI能走多远。所幸,行业已经迈出了最关键的一步——让技术脚踏实地,将安全置于炫技之上。这场关乎生命的“大考”,才刚刚开始。
