

IT之家 12 月 29 日消息,据哈尔滨工业大学(哈工大)今日消息,哈工大机电工程学院付宜利教授、倪风雷教授团队联合校友企业博实股份在人形机器人的双形态人形机器人整机、多型号关节模组、双版本灵巧手及智能控制算法等方面取得了阶段性成果。
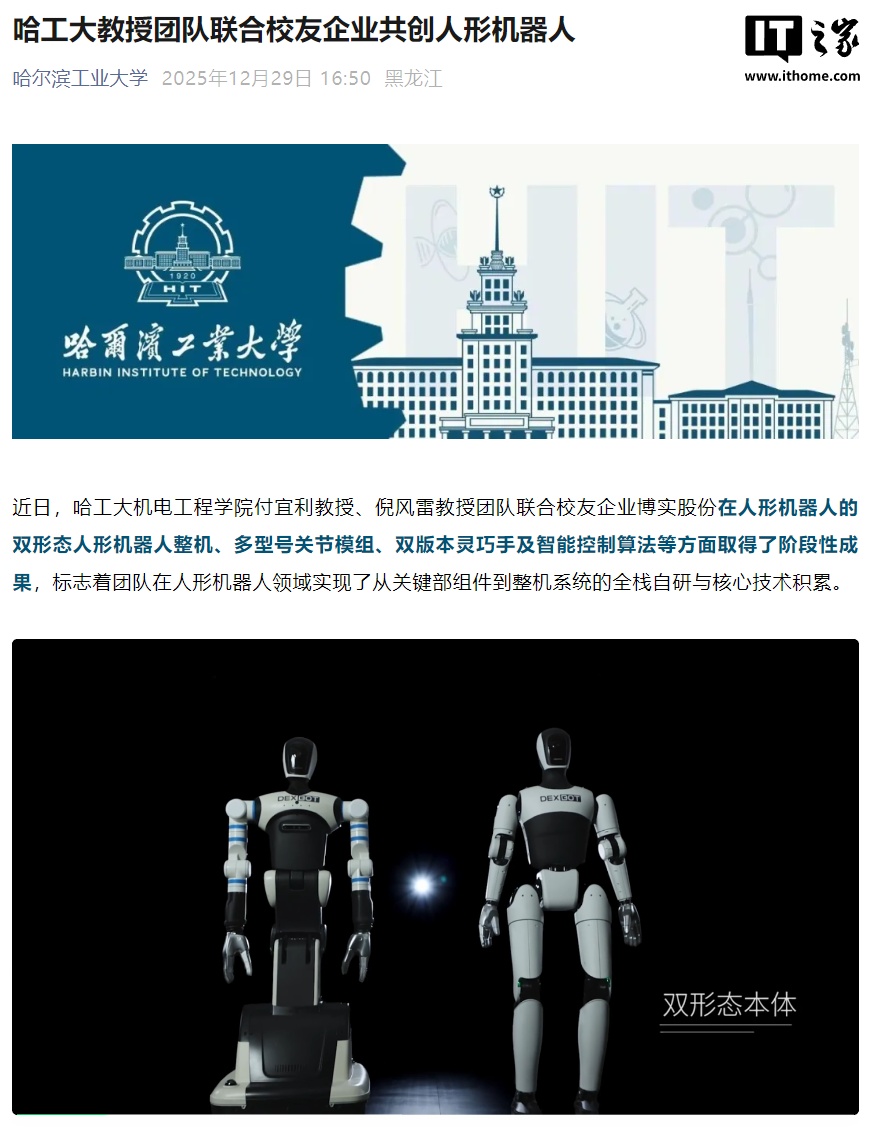
在人形机器人整机方面,研发团队形成了双足与轮式两款差异化架构的人形机器人平台。其中:
双足人形机器人样机主要面向非结构化、复杂地形环境中巡检与辅助作业任务。
轮式人形机器人样机则采用专注于平坦地面环境下的室内服务、物料搬运与精准作业任务。
两款机型均搭载 7 自由度串并混联机械臂,具备全关节力控功能,保障安全人机交互与精细柔顺操作。
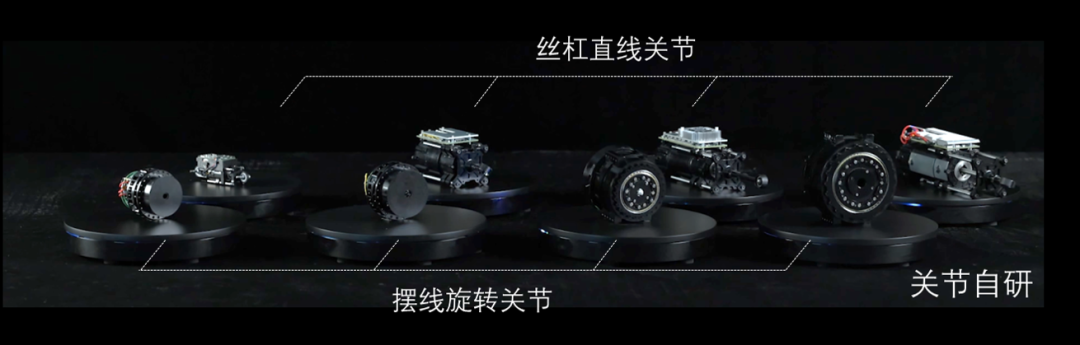
在核心关节模组方面,团队自研集成扭矩传感器的摆线旋转关节与纯滚动准直驱的摆线旋转关节,实现了机械臂关节在仅 5kg 自重下具备 5kg 的负载能力,以及腿部关节最大扭矩达 400Nm。此外,团队在直线关节上还实现了传感器与控制器的深度集成,最大推力达 10000N。
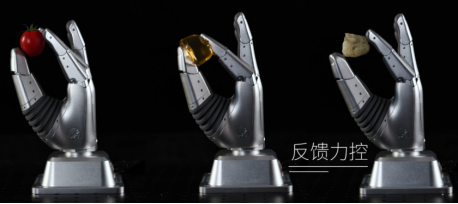
在灵巧手方面,团队研制了两种灵巧手方案:
一款为具有 20 关节、15 主动自由度的高性能灵巧手;
另一款为具有 11 关节、7 主动自由度的欠驱动轻量化灵巧手。
传动系统采用原创刚性肌腱方案,使单根手指能输出 30N 以上的动态指尖力,所有主动关节均集成双编码器与扭矩传感器,具备精细运动与柔顺力控能力。


在智能控制算法方面,团队采用哈工大自研“活字-日新”大模型作为机器人的智能中枢,提供语音对话、指令理解与任务分解能力。
团队还为机器人集成了自主导航与视觉能力。团队在控制上采取模型预测控制结合全身控制与强化学习的双路线并行策略,实现了机器人在复杂环境下的稳定运动。
IT之家查询公开资料获悉,博实股份是由哈尔滨工业大学及机器人研究所科研骨干创办的科技型企业。该公司创建于 1997 年,是专业从事智能制造装备及工业机器人研发、生产、销售、服务,并围绕系列产品提供智能工厂整体解决方案的高新技术企业。
