

突破场景瓶颈!众擎机器人公布人形机器人起身专利
2026-02-13
/ 阅读约2分钟
来源:凤凰网
深圳市众擎机器人申请的人形机器人视觉起身控制专利公布,突破起身稳定性不足痛点,核心控制方法分五大步骤,是运控算法领域重要突破。
【CNMO科技消息】近日,CNMO注意到,深圳市众擎机器人科技有限公司申请的“一种人形机器人视觉起身控制的方法及人形机器人”专利正式公布,专利公开号为CN121411292A,有效突破人形机器人在真实复杂场景下起身稳定性不足的行业痛点,为其商业化落地奠定核心技术基础。

众擎人型机器人
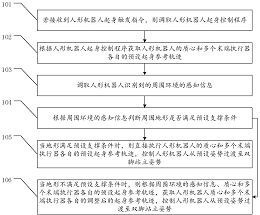
专利摘要显示,该申请核心目的是提升人形机器人起身动作在真实场景中的稳定性与成功率,解决传统人形机器人起身依赖固定地形、易失衡的技术难题。其核心控制方法分为五大步骤:接收起身触发指令后调取控制程序,获取机器人质心及多个末端执行器的预设起身参考轨迹,同步调取周围环境感知信息,判断地形是否满足支撑条件;当地形不达标时,结合环境信息、质心数据及预设轨迹,动态调整起身参考轨迹,最终控制机器人从预设姿势平稳过渡至双脚站立。
据CNMO了解,众擎机器人成立于2023年,专注于通用智能机器人及行业场景方案研发,产品覆盖科研教育、工业制造等多领域,团队汇聚国内外顶尖高校人才,具备全栈自研能力,曾入选粤港澳大湾区人工智能重点企业TOP50。此次专利公布,是该公司在人形机器人运控算法领域的重要突破,也是我国人形机器人核心技术自主化的又一具体成果。
