

当算法模型的迭代速度超越行业想象边界,当AI从屏幕后的工具跃变为渗透现实的“参与者”,2026年将成为人工智能发展的关键分水岭。
不再是“AI+”的修修补补,而是AI原生重构系统底层逻辑;不再局限于数字世界的生成与理解,而是物理AI打通虚拟与现实的行动闭环;不再是单一模态的孤军奋战,而是多模态技术融合万象;更有世界模型让AI从“数据应答”走向“规律预判”。
这场关乎技术架构、应用形态与认知高度的变革已然来临,谁将成为重塑产业、定义未来的最强风口?

AI原生引发系统应用底层革命
如果说“AI+”是在现有系统上“打补丁”或“外挂”AI功能,那么AI原生则意味着以AI为系统设计的底层逻辑与能力中枢,这套系统为AI而生、因AI而长,驱动从技术架构、业务流程、组织角色到价值创造方式的全方位重塑。
这种变革并非简单的功能叠加,而是以生成式AI为核心重构开发范式,让智能成为应用的原生属性而非附加能力。从“AI+”走向“AI原生”,正成为AI未来发展的关键方向。

一个真正的AI原生系统或应用,通常具备以下三个显著特征:
首先,以自然语言交互为基础。用户通过语言交互界面与后端交互,无需或者少量通过图形界面与后端交互,最终呈现GUI(图形用户界面)和LUI(语言用户界面)混合的交互形式,以实现用户从有限的输入跃迁到无限的输入,既提供高频、固定的功能,也具备对低频、定制化需求的理解与处理能力。
其次,具备自主学习和适应能力。在人机交互过程中,能够集成理解、记忆、适应多模态数据,并进行自我学习,能根据上下文、任务环境、交互对象的变化,对输出结果进行更准确、更个性化的调整。
第三,具备自主完成任务的能力:有能力基于大语言模型和知识库执行精确任务,实现端到端闭环,集获取任务到完成任务全流程于一体。

当前,AI原生开发平台已形成明确趋势,低代码/无代码工具让普通人无需编程即可打造专属AI工具,催生大量“一人公司”模式;微软、字节跳动等巨头正将AI智能体深度嵌入办公套件,实现“邮件摘要-日程规划-任务执行”的端到端闭环。
AI原生应用的发展需要各类工具应用的产品化,比如部署和管理大模型的Hub平台、产品化的大模型自动化微调工具、高精确度低成本的知识图谱生成管理工具、Agent高效编程的集成开发环境等等。大规模普及AI原生应用以解决各种问题的前提是具备完善的工具和框架体系,而非任一场景下都需要全流程自研。所谓“磨刀不误砍柴工”,产品化工具和框架的积累将是AI原生应用快速普及的关键成功因素。
落地价值在办公场景尤为突出,AI原生邮件工具可自动识别会议邀约并同步至日程,智能生成参会预案;设计类应用能根据用户草图实时生成多版方案并匹配市场数据。这种“需求直达结果”的模式,将知识工作者的重复劳动时间减少40%以上。
AI原生是2026年To C端最确定的增量市场,其核心竞争力不在于技术本身,而在于对用户习惯的重构——当AI从“需要召唤”变为“主动服务”,新的生态壁垒便已形成。
AI原生应用的技术架构、工具产品以及方法论会在1~2年内不断演进,积累量变因素,最终达到成熟、可大规模复用的程度,之后AI原生应用将全面爆发。而在短期内,“AI原生应用”与“传统应用+AI”仍将共存。
物理AI向现实世界全面渗透
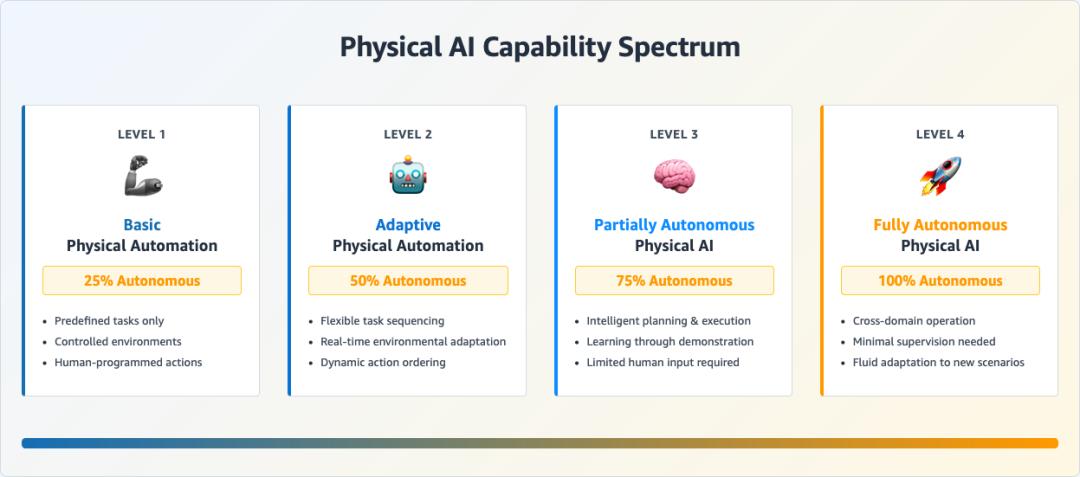
2026年的AI不再局限于屏幕,而是以物理实体的形态渗透到城市、工厂、医院、家庭等场景,这便是物理AI的核心——通过嵌入式智能连接数字世界与物理环境,实现从“感知”到“行动”的跨越。
AI的发展经历了三个清晰的阶段:
最初是感知AI(Perceptual AI),能够理解图像、文字和声音,这个阶段的代表是计算机视觉和语音识别技术。
之后是生成式AI(Generative AI),能够创造文本、图像和声音,以ChatGPT、DALL-E等为代表。
现在我们正进入物理AI(Physical AI)时代,AI不仅能够理解世界,还能够像人一样进行推理、计划和行动。
物理AI的技术基础建立在三个关键组件之上:世界模型、物理仿真引擎和具身智能控制器。
世界模型是物理AI的认知核心,它不同于传统的语言模型或图像模型,需要构建对三维空间的完整理解,包括物体的几何形状、材质属性、运动状态和相互关系。这通常通过神经辐射场(NeRF)、3D高斯溅射(3D Gaussian Splatting)或体素网格(Voxel Grid)等方法来实现空间表征,模型需要学习物理定律的隐式表示,比如重力加速度、摩擦系数、弹性模量等参数,并能够根据当前状态预测未来的物理演化。
物理仿真引擎则负责实时计算物理交互,这不是简单的预设规则,而是基于偏微分方程求解器的动态计算系统,需要处理刚体动力学、流体力学、软体变形等复杂物理现象,系统需要在毫秒级时间内完成复杂的物理计算,同时保证足够的精度来支持准确的决策。
具身智能控制器是连接虚拟推理和物理执行的桥梁,它接收来自世界模型的预测结果和物理仿真的计算输出,生成具体的控制指令。技术上,通常基于模型预测控制(MPC)或深度强化学习(DRL)算法,控制器需要处理高维的状态空间和动作空间,同时考虑执行器的物理限制、延迟和噪声。
物理AI之所以成为主流趋势,主要有两方面原因。
一方面,物理交互需求驱动物理AI发展。随着机器人、无人系统等智能设备在制造、医疗、物流等行业的快速普及,用户对其智能化水平提出了更高要求。不仅包括视觉识别与语义理解,更需要在真实环境中具备稳定、泛化、可迁移的感知、理解与执行能力,以应对非结构化、多变、复杂的现实物理场景。
另一方面,AI技术演进也会加速赋能物理实体。从视觉感知模型到决策控制算法,从大规模预训练模型到强化学习框架,AI正在为机器人、自动驾驶等系统注入更强的自主学习与任务执行能力。
特别是在机器人领域,技术进步正在催生新的应用场景。IDC预测,到2026年,AI模型、视觉系统及边缘计算将取得突破性进步,机器人可实现的应用场景数量将增加3倍,并在制造、物流、医疗、服务等多个领域广泛部署,推动实体系统全面智能化。
多模态将成为AI基础能力
随着AI技术的飞速发展,单一模态的AI模型已难以满足现实世界的复杂需求。2025年,多模态大模型(Multimodal Large Models,MLLMs)以强大的跨模态理解和推理能力,成为推动产业智能化升级和社会数字化转型的中坚力量。
多模态大模型不仅能同时处理文本、图像、音频、视频、3D模型等多种数据类型,还能实现信息的深度融合与推理,极大拓展了Al的应用边界。
多模态大模型的能力体系主要围绕“跨模态理解”与“跨模态生成”两大核心构建。
在跨模态理解方面,其核心能力体现在三个层面:
第一,出色的语义匹配能力,可判断文本与图片、音频与文字记录等不同模态信息是否语义一致,在内容检索和信息校验中作用重大。
第二,文档智能场景下的结构化解析能力,不仅能识别字符,更能在复杂场景中准确解析表格、版面、图文混排等内容,理解文档的深层结构与语义。
第三,多模态内容的深层解读能力,例如分析带文字说明的图表、关联视频动作与同期声、解读图文社交媒体内容的情感倾向等。
跨模态生成则更为引人注目,基于一种模态生成另一种模态内容已成为现实。除常见的图像转文本外,还包括文本生成图像、音频转文本、文本生成音频、视频生成文字梗概等,极大拓展了内容创作的边界。
此外,多模态大模型还展现出多模态思维链和多模态上下文学习等高级认知能力。这意味着模型能够模仿人类的推理过程,通过逐步解析多模态信息解决问题,为构建更接近人类认知方式的AI系统奠定了基础。
当前的语言大模型、拼接式的多模态大模型对人类思维过程的模拟存在天然的局限性。从训练之初就打通多模态数据,实现端到端输入和输出的原生多模态技术路线给出了多模态发展的新可能。
基于此,训练阶段即对齐视觉、音频、3D等模态的数据实现多模态统一,构建原生多模态大模型,成为多模态大模型进化的重要方向。
所谓“原生”,是指模型在底层设计上就将图像、语音、文本乃至视频等多种模态嵌入同一个共享的向量表示空间,从而使不同模态间能够自然对齐、无缝切换,无须经过文本中转,以实现更高效、更一致的理解与生成。
2026年,多模态大模型将以前所未有的速度重塑各行各业。其技术突破体现在跨模态理解、数据融合、推理优化、训练资源管理、数据安全与伦理合规等多维度。尽管在空间推理、数据对齐、模型泛化等方面仍有挑战,但通过自动化标注、模型压缩、中间件调度等创新手段,这些问题正逐步被攻克。
目前,多模态大模型已在文物保护、安防、智能驾驶、内容创作、工业质检、政务服务等领域展现出巨大价值,从实验探索阶段迈向以实际应用为导向。比如,Sora 2在视频与音频生成上实现物理逼真、镜头控制、音效同步等突破;Nano Banana Pro在图像生成与编辑方面向前走了一大步,支持多图融合、4K输出、逻辑一致性与多语言文本渲染。
新的一年,随着技术创新和行业应用的深化,多模态大模型将成为数字经济时代的核心引擎,推动社会迈向更加智能、高效和可持续的未来。
世界模型引爆AI新一轮增长
从OpenAI的Sora(文本→视频世界模拟)到DeepMind的Genie(可交互世界生成),从Meta的V-JEPA 2(视觉自监督世界模型)到特斯拉在自动驾驶系统中隐含的世界意识探索,这些案例都表明世界模型正成为AI迈入现实世界的关键支点。
世界模型让AI从“数据驱动”转向“规律驱动”,通过构建虚拟世界模型模拟物理规则,实现前瞻性决策,这将是2026年最具颠覆性也最具挑战性的领域。
世界模型并没有一个标准的定义,这一概念源于认知科学和机器人学,它强调AI系统需要具备对物理世界的直观理解,而不仅仅是处理离散的符号或数据。
世界模型的价值在于“泛化能力”——能够将已知场景的认知迁移到未知场景,例如在未见过的乡村道路上,基于对物理规律的理解,依然能安全行驶。
特斯拉与谷歌等企业正积极研发世界模型,通过输入图像序列与提示词,生成符合物理规律的虚拟场景,用于模型训练与仿真测试,形成“数据-模型-仿真”的无限闭环。
行业普遍认为,世界模型是一种能够对现实世界环境进行仿真,并基于文本、图像、视频和运动等输入数据来生成视频、预测未来状态的生成式Al模型。它整合了多种语义信息,如视觉、听觉、语言等,通过机器学习、深度学习和其他数学模型来理解和预测现实世界中的现象、行为和因果关系。
简单来说,世界模型就像是A1系统对现实世界的“内在理解”和“心理模拟”。它不仅能够处理输入的数据,还能估计未直接感知的状态,并预测未来状态的变化。
这个模型的核心目标是让AI系统能够像人类一样,在内部构建一个对外部物理环境的模拟和理解。通过这种方式,AI可以在“脑海”中模拟和预测不同行为可能导致的后果,从而进行有效的规划和决策。
例如,一个具备世界模型的自动驾驶系统,可以在遇到湿滑路面时,预判到如果车速过快可能会导致刹车距离延长,从而提前减速,避免危险。这种能力源于AI内部对物理规律(如摩擦力、惯性)的模拟,而不是简单地记忆“湿滑路面要减速”这条规则。

世界模型具有三大核心特点:
其一,内在表征与预测。世界模型可以将高维的原始观测数据(如图像、声音、文本等)编码为低维的潜在状态,形成对世界的简洁而有效的表征。在此基础上,它能够预测在给定当前状态和动作的情况下,下一个时刻的状态分布,从而实现对未来事件的前瞻性预测。
其二,物理认知与因果关系。世界模型具备基本的物理认知能力,能够理解和模拟物理世界的规律,如重力、摩擦力、运动轨迹等。这使得它在处理与物理世界相关的问题时,能够提供更准确、更符合现实的预测和决策支持。
其三,反事实推理能力。世界模型不仅能够基于已有的数据进行预测,还能够进行假设性思考,即反事实推理。例如,它可以回答“如果环境条件改变,结果会怎样”这类问题,从而为复杂问题的解决提供更多的可能性和思路。
技术层面,世界模型关键技术包括因果推理、场景重建时空一致性、多模数据物理规则描述、执行与实时反馈。全球主流模型如谷歌Genie3、英伟达COSMOS等,国内华为盘古、蔚来NWM等模型在不同应用场景展现优势。
应用领域,在自动驾驶中,世界模型可生成高动态、高不确定性场景,解决长尾问题,通过构建闭环反馈机制赋能自动驾驶系统,降低成本、提升效率,未来将向多模态融合、通用化等方向发展。比如蘑菇车联MogoMind通过将物理世界实时动态数据纳入训练体系,突破了传统大模型仅依赖互联网静态数据的局限,实现从全局感知、深度认知到实时推理决策的闭环,可以为多类型智能体提供实时数字孪生与深度理解服务。
在具身智能中,世界模型提供大规模高质量合成数据,解决数据缺口问题,还重塑开发范式,未来将构建“物理+心智”双轨建模架构,提升人机交互与多智能体协作能力。
在数智化浪潮中,企业的生存法则已从“全面应用AI”转变为“深度融合AI”。2026年的人工智能,早已超越工具属性,开始真正扎进产业与生活的实际场景里,成为驱动社会进化的核心动力。
正如熊彼特所言的“创造性破坏”,AI正在改写行业竞争的底层逻辑——未来的胜负,不再取决于单一技术的领先,而在于“数据密度×算法精度×场景厚度”的协同爆发力。
这场跨越数字与物理、连接数据与规律的革命,终将让智能融入社会与生活的肌理。AI改变世界的旅程,才刚刚开始,下一步将走向何方,只待时间给出答案。
