

新能源汽车交付创新高,没有换来特斯拉股价大涨,原因之一是真正被期待的人形机器人,还是没有量产的确定性。不过,人类真的需要人形的机器人吗?
特斯拉,被“一只手”困住了。
10月23日,特斯拉发布了2025年第三季度的财报。营收281亿美元,从上季度的同比下跌11.78%到本季度的增长12%。在49.7万辆这个创新高的季度交付数据之下,增速达到7.39%,从负转正。
结果财报发完,第二天开盘前特斯拉股价跌幅一度超4%,今天(美股时间10月23日收盘)特斯拉股价报收微涨2.28%至448.98美元股,不过比起月初高位已经跌去了近5%。
新能源汽车交付创新高没有换来股价大涨,原因之一是真正被期待的机器人,还是没有量产的确定性。
马斯克自己曾多次表示,自动驾驶和人工智能才是特斯拉未来增长的关键点。他在社交媒体上称,公司约80%的价值最终来自人形机器人Optimus。
这次财报会议上,马斯克称特斯拉将在2026年年底开始建造一个百万产能的Optimus生产线,但眼下更确定的是供应链缺失、灵巧手难突破的风险。
马斯克执着于人形机器人的背后,到底是资本需要故事,还是人类真实需求。
叫停的Optimus
三年之后又三年!
一个多月之前,特斯拉公布了“宏图计划4.0”。机器人成了“绝对C位”,马斯克甚至表示:未来特斯拉80%的价值将来自于机器人。
结果,这话说完没多久,量产Optimus这件事情就传出被暂停了。
在财报会议上,马斯克聊起了量产机器人的难度——
没有供应链:汽车有成熟的供应链、计算机有成熟的供应链,但是机器人没有。想要量产机器人,特斯拉需要从零建立一个供应链,难度可想而知。
事实上,这并不是Optimus第一次被推迟。
自2021年马斯克在AI Day首次提出“打造会走路、能工作的通用机器人”概念以来,这个项目已经历三次大的节奏变化。
第一次是在2023年,Optimus原计划在2024年实现“首批出货”,但由于基础运动控制算法未达标,被推迟一年;
第二次是在2024年底,量产目标被下调至2025年试产数千台;
第三次便是今年10月,特斯拉再次被爆出暂停Optimus的量产。
除了量产“放鸽子”,机器人高层也传来变动的消息,前段时间特斯拉机器人项目负责人Milan Kovac离职,这位出身波士顿动力、主导Optimus系统架构的核心人物,在特斯拉内部被视为“最懂机器人运动控制的人”。他的离开一度引发团队重组。据多家外媒报道,马斯克随后亲自接手项目方向,研发汇报线从自动驾驶部门并入AI芯片团队。
尽管如此,在财报会议上,马斯克也没忘记自己一贯宏大叙事的风格,表示Optimus人形机器人被视为具有成为史上最伟大产品的潜力,特斯拉计划在2026年一季度展示V3原型。
“我们将在明年第一季度,可能是2月或3月,准备好展示一个生产意图的原型。在明年年底左右开始建造一个百万单元的Optimus 生产线。但是这个生产爬坡需要一段时间。最终,Optimus 4将达到1000万台,Optimus 5可能会达到5000万到1亿台。”
不过投资人在长期不确定性和短期风险性之间琢磨了一下,还是选择短期离场,特斯拉财报发完盘前股价跌超4%,市值缩水了4000亿人民币左右。
机器人对特斯拉的意义存在在现实层面,也存在于故事层面。
现实层面,特斯拉需要第二曲线。
这个季度特斯拉交付量虽然创了历史新高,但是销量增长的长期稳定性是受到质疑的。
一方面美国政府为合格电动车提供7500美元的联邦税收抵免,这个优惠在2025年9月30日到期,所以很多消费者都赶在三季度结束之前完成购买;另一方面,从2022年到现在每个季度的增速曲线不难看出,特斯拉交付规模的同比增速在大幅下滑。
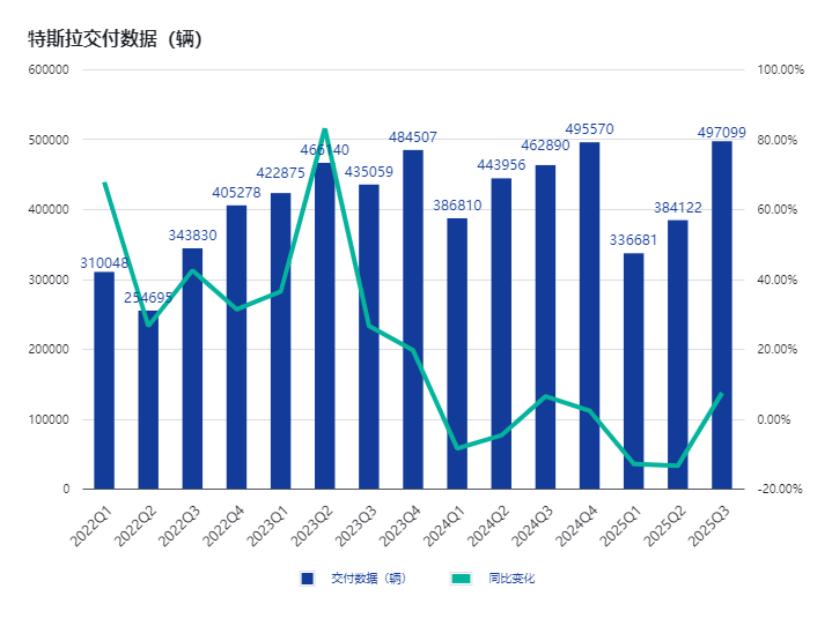
数据来源:特斯拉。制图:豹变
故事层面,特斯拉的市值包含了市场对机器人的预期。
特斯拉现在市值有1.4万亿,这是什么概念?去年特斯拉卖了178.9万辆车,丰田卖了1080万辆,是特斯拉的6倍;比亚迪卖了427万辆,是特斯拉的2.4倍。而丰田汽车总市值2632亿美元,不到特斯拉的两成;比亚迪市值9462亿人民币(折合美元1212亿),不到特斯拉的约十分之一。
显而易见,这份市值不是给一个车企的,是给一个科技企业的。
特斯拉说的没错,在机器人供应链和量产能力上,他们已经全球领先。机器人量产、需求层爆发的话,特斯拉相当于二次创业成功。因此不论是特斯拉还是市场都不会错过这场“危险又迷人”的豪赌。
被困住的手
特斯拉在帕洛阿尔托的总部已有Optimus在全天候行走,“他甚至可以给你带路”,马斯克在财报会议上说道。
“但关键的问题是手”。
北京大学专门做机器人系统研发的张博告诉《豹变》,“体积小、活动度大是灵巧手量产困难的核心原因。”
张博说,“汽车四个轮子互相独立,只需要把一个物体在二维空间从点移动到点,而手的方向是完全三维的,手指之间每个关节之间的链接都有关系,因此造手比造车难度都要大很多。”
让一只灵巧手动起来离不开几个核心零部件:电机、减速器、连杆骨架、传感器以及热管理。
电机嵌在手掌或前臂中,负责提供旋转力。但电机输出的转速太高、扭矩太小,还需要通过减速器把力量放大,特斯拉的Optimus手臂内就有多组谐波减速器,几乎每个关节都需要一个。
动力传到关节后,还要有骨架与连杆系统,让“指骨”能传导力量。人每只手有14块骨头,机器人手则用钛合金、碳纤维或轻质铝件来模仿这些结构。骨架不仅要承受负载,还得保持轻量,否则手臂无法平衡。
这些机械系统要真正“动得准”,离不开神经系统——传感器与控制电路。每个关节上有角度传感器,指尖有力传感器,有的甚至带有触觉阵列,能感知压力分布与滑动趋势。
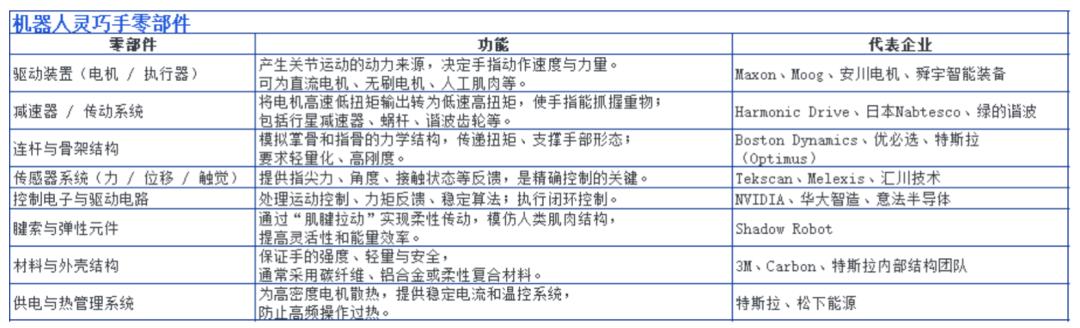
数据来源:公开信息。制图:豹变
由于指关节物理空间实在太小,就对每个相应零部件的精密制造要求非常高。张博则告诉《豹变》,现在的灵巧手多数有几个问题:
抓力不足、灵活性不够、动作准确性不够。
抓力不足,还是因为空间太小,小空间只能放下小电机,电机体积就会影响能量密度,“现在六七十公斤的机器人只能抓取十公斤左右的重物,”张博说道,“比起我们对机器人的期许,这是远远不足的。”
为了让灵巧手既小巧又强大,工程师尝试用“电动肌肉”来取代传统电机,例如利用形状记忆合金、电活性聚合物(EAP)或磁致伸缩材料制造可伸缩执行器,让“肌肉”能直接驱动手指。这些“人工肌肉”理论上能在极小体积内提供更大力量和柔性,但商业化上仍有距离。
灵活性的问题,则来自“自由度”与控制复杂度的矛盾。人手有超过20个自由度,机器人若想模仿,意味着需要上百个电机、传感器和控制回路。要在掌心这样狭小空间里布满线缆和传动机构,同时保证寿命与耐用,是巨大的工程挑战。
至于行动准确性,则是“感知与控制”的较量。机器人往往能“抓住”,但很难“拿稳”。因为触觉反馈延迟、摩擦力估算不准,导致指尖无法微调。现在的解决思路是把AI视觉与触觉融合,让手在抓取前用摄像头判断物体形状,再在触觉传感器检测到接触瞬间修正力度。
像英伟达、Flexiv这样的公司正在尝试让机器人通过模仿学习,在大量抓取数据中优化动作。
技术瓶颈是一个问题,成本太高是另一个问题。今年2月摩根史丹利在其报告中评估特斯拉Optimus Gen2一台的造价在5-6万美元,而马斯克则说过,希望机器人整体造价低过造车,大概一个unit造价在2.5万-3万美元,也就是说现在的造价是目标成本的2倍。
一定要是人形吗?
当世界上最想要也最有可能量产人形机器人的公司被灵巧手困住的时候,我们不禁要问出一个问题:为什么一定要是人形机器人?
其实,非人形的机器人在我们生活里已经非常普遍了。
酒店里送水、送餐的机器人多半是圆柱体造型,底部靠轮式导航,顶上一个货架;商场里的清洁机器人,类似放大版扫地机,靠激光雷达和超声波避障,每天默默跑完几百平方米;在京东、亚马逊的物流仓里,成百上千台自动搬运车在地面行驶,精准地从货架到分拣台。
这些机器的成功,恰恰因为它们“放弃了模仿人类”。
它们突破的是单点需求。
清洁、搬运、配送,功能单一、路径确定、成本可控。而且这些机器人已经有相当成熟的商业化市场,扫地机器人全球年销量超 4000 万台,商用清洁机器人市场增长超过 40%. …… 换句话说,机器人能不能赚钱,从来不取决于像不像人,而在于有没有明确的任务和成本回报。
那么为什么,马斯克还是要做人形机器人呢?
他想复制的不是形态,是通用性。人形机器人是工具,人形机器人是平台。
从工业史的角度看,机器的演化逻辑始终在“通用化”每一次可以称之为“革命”的迭代,不是因为效率更高,而是因为它能适应更多不确定的场景。
在一个为人类设计的世界里,门把手的高度、货架的宽度、楼梯的坡度都围绕人的身体尺寸而建。要让机器人进入这些环境,最直接的方式就是——让它长得像人。
但是,我们必须得回答第二个问题:通用是我们对机器人真正的需求吗?
或者我们换个提问的方式:人类对机器人的需求到底是什么?
我们需要它去解决我们解决不了的问题,或者至少达到我们达不到的效率。
比如对于深度清洁来说,当人类打扫床下空间反而因为身体过大无法全面覆盖,扫地机器人的物理形态就解决了这个问题。
所以通用性其实是牺牲了一定的针对性的。而用户需要的到底是一个什么都能做的机器人,还是在特殊场景里可以做得最好的机器人,这才是讨论人形机器人需求的终极课题。
资本市场需要的宏大叙事,和用户心智追求的真实需求,在人形机器人上能不能重叠,尚未可知。
(应受访者要求,文内 张博为化名)
