

具身智能,找客户难。
但深圳一家机器人公司,却有一批千亿级大厂为之买单。
美的工厂里,机器人分拣,效率是人工3倍;海信生产线中,机器人用于柔性插拔装配,成功率达99.99%。2024年又推出人形机器人,2025年就批量出货超百台,拿下了比亚迪、广汽、中联重科、三一重工、松下、大金、蓝思科技等客户。
这就是跨维智能,通过为制造业客户提供机器人大脑和人形机器人,年收入已突破亿元。
跨维智能创立于2021年,之所以在不到五年就大规模落地,秘密是解决了数据难题。
物理世界的数据天生稀缺,行业大多靠真机采集数据,效率低还复用难。跨维智能创始人贾奎带着团队,用计算机模拟物理环境“造数据”,解决了机器人在真实世界中训练数据匮乏的难题。
在跨维智能搭建的虚拟世界里,物体有重量、会碰撞,能无限生成训练数据——今天练分拣圆形零件,明天换方形;今天模拟晴天,明天换阴天,还能故意设置油污干扰。
资本同样看好跨维智能的“数据核武器”。跨维智能已经完成多轮大额融资。刚创立就获得近千万美元天使融资。
2025年年中,又获得数亿元A1&A2轮融资,投资方包括领投方成都科创投、洪泰基金,以及联想创投等一众新老股东。
跨维智能的客户分部在汽车零部件、新能源、3C电子、航空航天、物流、家电、化工、医疗、教育等50多个细分行业。
贾奎是“80后”,山西人,本科毕业于西北工业大学,并在伦敦大学玛丽女王学院获得博士学位。目前,他的另一重身份是香港中文大学(深圳)教授。
最近,铅笔道与多家媒体一道,与贾奎交流,共探机器人新机会。
1、机器人下一个落地场景是什么?
服务机器人。技术将成熟到“好用且不贵”,机器人成本能降到客户18至36个月回本的区间。2027年开始起量,2028年有望迎来爆发,复刻工业机器人当年的发展路径。
2、2026年,哪些领域会爆发?
三维物理世界模型成为行业热点,接近人类自然动作的数据采集设备(如手环、头环)会爆发。
3、乐观看,具身智能的前景有多大?
如果核心数据问题能彻底解决,优秀公司的估值或能达到大模型公司的10倍。
01
2021年创业的时候,“具身智能”概念别说火,行业里都没几个人提。
我们很想搞明白:AI能不能跳出屏幕,从文本、图像这些虚拟数字世界,真正走进生活的三维物理世界?
而AI要在物理世界自主完成任务,必须有载体,就是机器人,这也是具身智能的核心逻辑。
很多人会把具身智能和人形机器人画等号,其实这是个误区。具身智能是“让AI在物理世界做事的能力”,而人形机器人只是这种能力的一种载体。哪怕是一个只有一只“手”的机械臂,只要能靠AI感知环境、自主完成任务,也属于具身智能的范畴。
但无论载体是什么,机器人最终的价值都要落到“劳动力”上:要么比人效率高,要么能做人做不了的事,要么能降低成本。

跨维智能创始人贾奎
工业领域的机器人普及度一直最高——汽车工厂的焊接机器人、3C工厂的组装机器人已存在几十年——但有致命缺点:成本太高且太“死板”。
一套传统工业机器人系统可能要几十万甚至上百万,只有汽车、手机这种大批量生产的行业才用得起;而且它们只能做固定动作,一旦产品型号变更,就得重新编程、调整设备,中小批量生产的工厂根本扛不住这个成本。
而商业场景和家庭场景的问题更突出:机器人渗透率极低。商场里难见真正干活的机器人,家里的扫地机器人本质还是“自动化设备”,不是能自主决策的“智能体”,核心原因是这些场景太复杂、太灵活,传统机器人的“脑子”不够用。
具身智能还不能像人一样,适配不同场景,兼顾智能、通用与低成本,根子在数据——物理世界的数据天生稀缺。
你想让机器人学会分拣零件,互联网上找不到“零件重量+抓取力度+环境光照变化”的组合数据;想让它学会插拔电线,也没有现成的“力觉反馈+插拔角度+电线材质”的数据集。这些数据是三维的、多模态的,还和具体场景强绑定,根本没法像爬取文本那样批量获取。
既然真实数据不够,能不能用计算机模拟物理环境“造数据”?这就是生成式仿真的雏形。当时这个想法很超前,行业里大多还在靠真机采集数据,我们却开始琢磨怎么构建虚拟物理环境,生成机器人需要的训练数据。
大模型让AI的“理解能力”上了一个台阶,但数据瓶颈仍未突破。很多同行的尝试都走不通:真机遥操作采集数据效率太低,百万条模型训练数据需要大量人工,且不同场景的数据无法复用;视频生成技术只能提供二维表象,缺了物理机理支撑,模型到真实场景里很容易“翻车”。
我们的解决方案是在计算机里搭建一个遵循真实物理规律的“虚拟世界”(这个虚拟世界名字叫GS-World),物体有重量、会下落、碰撞会反弹,甚至摩擦力、重力、阻力都能精确模拟。
在这个虚拟世界里,我们能无限量生成训练数据:今天让机器人练分拣圆形零件,明天可换成方形;今天模拟晴天光照,明天能换成阴天;甚至能故意设置干扰,比如让零件沾油污,看机器人怎么调整策略。
之后,我们通过微调模型,把仿真训练的“能力”转化为落地“技能”。目前已有多个行业案例:
美的工厂的无序零件分拣机器人,效率是人工的3倍;海信生产线的柔性插拔装配机器人,成功率达99.9%,这些都是过去只能靠熟练工人完成的任务。
02
2021年公司运营后,我们将业务分为两大板块,核心都是“把具身智能转化为商业价值”:
在泛智能制造领域,我们定位“卖机器人大脑”——提供操作大脑和纯视觉传感器,适配ABB、库卡等国内外主流机器人本体,不用替换现有设备就能实现柔性生产。客户涵盖美的、海尔、海信、广汽、比亚迪、松下、蓝思等头部企业,集中在汽车零部件、3C、家电、新能源行业。2023-2024年,这块业务年增速至少翻倍。
商业服务板块则走“大脑+本体”的全栈路线。因为商业场景没有现成的机器人载体,我们2024年发布DexForce W1系列人形机器人,定位“通用灵巧作业平台”。
它的上肢有7个自由度,能做出和人手类似的灵活动作,搭配GS-World训练的模型,可完成冲咖啡、取餐、扫码支付、导引讲解等复杂任务。目前已与头部文旅运营商、连锁咖啡品牌深度合作。2025年8月开始批量出货,出货量已超百台。
我预判2026年是商业服务机器人的元年——届时技术将成熟到“好用且不贵”,机器人成本能降到客户18-36个月回本的区间。2027年开始起量,2028年有望迎来爆发,复刻工业机器人当年的发展路径。
我一直认为,具身智能行业要发展,必须解决“数据平权”。此次更是将GS-World的核心底座EmbodiChain直接开源,让大家可以自己去生产数据,训练模型,不怕技术抄袭,是因为我们的核心竞争力在物理建模算法和工程化落地能力,且行业需要更多参与者一起做大“蛋糕”。
“AI定义本体”是我们的特色:把机器人构型、关节参数建模成图结构,AI可根据任务目标(如“最低成本实现最高抓取率”)优化设计,我们的人形机器人本体就大量采用这种方案,比传统设计更灵活、成本更低。
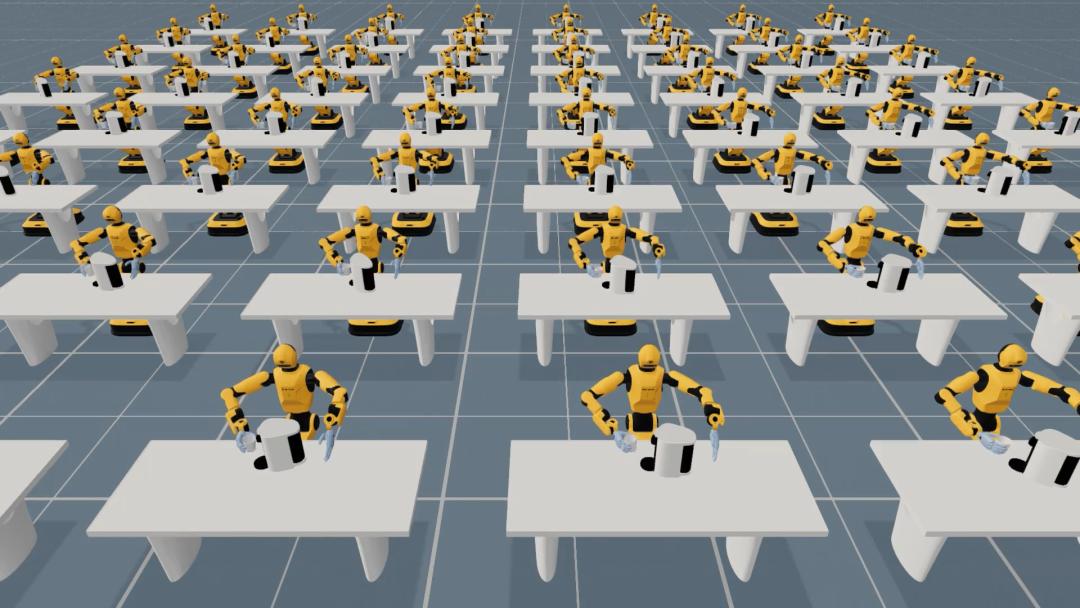
机器大脑在虚拟世界中学习咖啡机操作
过去一年,行业虽有泡沫,但进步实实在在:模型泛化能力更强、机器人成本更低、核心零部件供应链更成熟,尤其是以深圳为代表的中国硬件供应链,在响应速度和成本控制上优势明显。
我判断2026年将有两大趋势:
1、三维物理世界模型成为行业热点,
2、接近人类自然动作的数据采集设备(如手环、头环)会爆发。
工业仿真技术已成熟几十年,精度完全满足需求;所谓差距是所有数据的共性问题,我们通过生成极端场景数据扩大数据分布,让模型见过足够多的“意外”,到了真实场景自然能应对自如。我们的商业模式核心是“卖能力”,交付给客户的是“不用管就能干活的劳动力”,而非单纯的数据或产品。
如果具身智能的核心数据问题彻底解决,优秀公司的估值或能达到大模型公司的10倍——因为具身智能作用于物理世界,能直接带动实体经济,提升工厂效率、降低服务成本、改善家庭生活。
